About
I’m a high school student aspiring to study computer science. Welcome to my website!

Skills
Efficient in HTML, CSS, Java, Python and JavaScript
Resume
Sumary
Kartikeya Agarwal
- Address: A-12 Nirala Nagar, Lucknow, Uttar Pradesh, India
- Email: agarwal.kartikeya27@gmail.com
Education
City Montessori School
Grade 9 to present
Current Year Subjects: English, Mathematics, Physics, Chemistry, Physical Education, Computer Applications
Python for beginners by Raghavendra Singh
Grade 10
CS50's Introduction to Programming with Python
Grade 11
CS50's Web Programming with Python and JavaScript
Grade 12
Academic/Scholastic Achievements
Secured 9th position
Grade 9
Certificate of Merit/Excellence for physics
Grade 9
Scored highest marks in computer applications, biology and geography
Grade 10
Leadership Responsibilities/Roles
President, CONFAB Club, City Montessori School
Grade 11
Computer Science Projects & Internships
Worked under Associate Clinical Professor Amitabh Chaudhary of University Of Chicago on learning the commercial uses of sorting algorithms
Grade 11
Worked in CSIR-IITR on a project on implementing machine learning model to predict the likeability of a patient having cancer(CSIRIITRReport to be attached here)
Grade 12
Designed and developed a smart cane which helps visually impaired people travel and navigate (Smartcanereport and smartcanedemoto be attached here)
Grade 12
Public Speaking
Model United Nations (MUN) - Attended the La Martinière College Model UN
Grade 11
Member of UNSDG conference
Grade 11
Organizing member for the KIMUN
Grade 11
Community Service
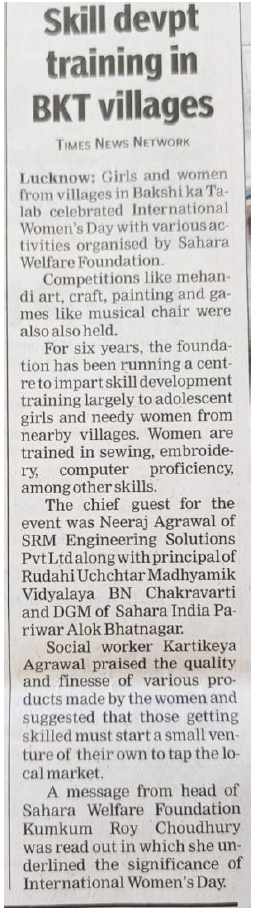
Volunteer, Bye Bye Anxiety > Taught english to a non-native english speaker > Member, Sahara welfare foundation
Grade 11
Additional Information
Examples
Computer Language Proficiency: HTML5, CSS, Java, Python
Learned classical music till level 3
Participated as an organising member in the opening ceremony of ITMO














Smart Cane for the Visually Impaired
Kartikeya Agarwal
City Montessori School
Gomti Nagar 1
Lucknow, India
Abstract—An efficient reintegration of the disabled people in the family and society should be fulfilled; hence it is strongly needful to assist their diminished functions or to replace the totally lost functions. Assistive technology helps in neutralizing the impairment. Recent advancements in embedded systems have opened up a vast area of research and development for affordable and portable assistive devices for the visually impaired. Granted there are many assistive devices on the market that are able to detect obstacles, and numerous research and development currently in process to alleviate the cause, unfortunately the cost of devices, size of devices, intrusiveness and higher learning curve prevents the visually impaired from taking advantage of available devices.
Index Terms—Visually impaired, ultrasonic sensor, obstruction detection, mobility aid
I. INTRODUCTION
According to the World Health Organization (WHO), there are approximately 285 million people who are visually
impaired worldwide: 39 million are blind and 246 have low vision [1]. Among many constraints faced by a blind
person, the challenge of independent mobility and navigation is eminent. Mobility of blind and low vision individuals is
a combination of two related techniques: local navigation and global way finding. Local navigation is about sensing
with white canes, relying on surrounding sounds, tactile clues from the ground surface and the use of guide dogs. Way
finding is a matter of experience and/or training. Mostly visually impaired people must rely on assistance of sighted
persons to find their way or need an accompanying person to follow; at least during a training period. This means that
the majority of visually impaired people cannot find their way autonomously in an unknown area. Generally vision-less
persons use a white cane or walking cane. It is a pure mechanical device dedicated to detect static obstacles on the
ground, holes, uneven surfaces, steps and other hazards via simple tactile-force feedback.
Its light weightiness and the capability to be folded into a small piece can be advantageous to carry around when not
required. These simply designed canes are only capable of detecting below waistline obstacles like street curves, steps and staircases and simple guidance between distances. Although these canes are capable of detecting obstacles, receiving feedback is very low. Therefore visually impaired individuals still find it difficult to navigate especially in unknown environments. More high-tech devices, using different types of range finders, have been in the market and have been widely used too but they are discarded on the basis of cost and other factors.
- The Guide Cane provided aid for obstacle detection and navigation which used an ultrasound sensor. The sensor head is mounted on a steerable axel to detect obstacles and steer the device around it. Its drawback was that it required GPS system for navigation [3].
- The Mowat Sensor is employed with a pulsed ultrasound which is ordained with an analogue vibratory feedback operating over two ranges of distance: up to one meter and up to four meters. The vibration frequency is inversely proportional to the distance between the sensor and the object [2].
- The C-5 Laser cane is embedded with a laser beam which is aimed above and ahead. After collision with the obstacle the laser beam is reflected back, which is acquired by three photodiodes as receivers [4].
- The Binaural Sonic Aid (Sonicguide) is a device which furnishes much information about aspects of the milieu which lies outside the immediate path of the user. The device is incorporated in the pair of spectacle with two receivers mounted on left and right side, while, the transmitter faces straight piercing the environment via pulsed ultrasound. An obstruction visualised on the left side is detected by the receiver, which, will provide a signal to left ear and similarly for right ear. Hence, allowing the user to determine the direction of obstacle[2].
- The Path Sounder was developed by Russell [1966], as the Lindsay Russell Path Sounder. The crux of the whole concept was that, the blind person shall not have to deal with complex auditory stimuli from the mobility aid while navigating through milieu. The device used single pulse ultrasound to connote the presence, absence of an object in the travel path and to indicate its relative distance [6].
- The Nottingham Obstacle Detector (NOD) is a hand held device subsumed with ultrasound. The device provides feedback as a unique note on the musical scale which is audible, and depicts the distance of the obstacle [5].
The aim of the project was to design and implement a device for sensing the surrounding environment using an ultrasonic sensor and sending the feedback to the user of the position of the closest obstacle in sensor’s range. In a way, the traditional cane is enhanced by furnishing information about the obstacles before direct contact, as the cane does not provide any information beyond its immediate length. In addition, when the user is in motion, they cannot detect obstacles on the ground and above the waist simultaneously. The designed system has the ability to detect above-knee obstacles within 3 meters and alert the user in real-time with a combination of a vibration motor mounted on the cane grip or on a velcro band.
II. IMPLEMENTATION OF DESIGN THINKING PRINCIPLES
Walking is very important in our daily lives. However, for blind people, current facility and environment are not convenient for them to walk. And due to some current problems, white canes require more attention from the society and need to be improved. This project combined the engineering creativity theory with the creative thinking process. Techniques from the creative design methodology were applied. After discussing and making some adjustments, this project proposed a helpful tool for the blind which uses technology with minimal complexity and allows the visually impaired to be more aware of their surroundings above the knee level as well.
III. DESIGN
The main reason for designing the Obstacle Detector Systems is to make the visually impaired person acknowledged
about the obstructions beforehand. Such aid gives user more knowledge about the milieu and enables them to make decisions much more quickly, thus allowing them to move around more confidently and effectively. The cane may be used in the nearby milieu may be in a park, at work, at home, and while a long peregrination. The designed assisted device helps a visionless person to visualize the surrounding using the sensor and vibrations. The following block diagram describes the prototype model of obstruction detector system. An Arduino is used as system controller. The various components of the system are discussed below.
A. Circuit Design
The system is powered by a single 9V battery which is easily replaceable whenever the device runs out of battery. The working of the system is quite simple–the device starts to detect the obstacles from one meter away and gradually
increases the intensity of the vibration motor to indicate the visually impaired person that some obstacle is in front of them. As the obstacle comes closer, the intensity of the vibration increases. The circuit design can be seen in the figure 1.
B. Enclosure
The design incorporates all the technology required for the function of any white cane as a ”Smart-cane”. It has slots through which the velcro belt can pass through and can be fastened to any ordinary smart cane. The enclosure houses sensor, microcontroller, vibration motor and the battery.
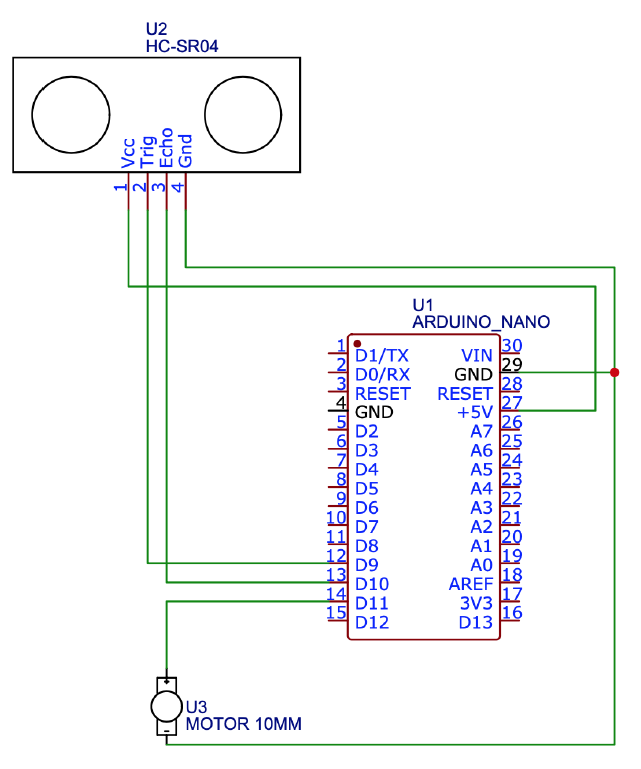
Fig. 1. Schematic of the Smart Cane
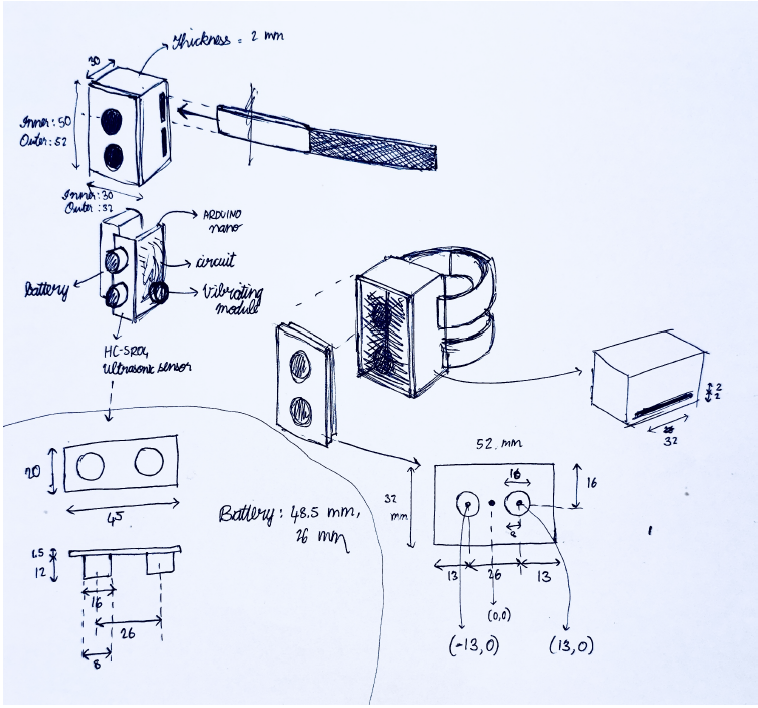
Fig. 2. Casing of the device which can be attached to any white cane
C. Simulation
IV. CONCLUSION
The basic aim of the design was to develop and implement an Obstruction Detection System for Visually Impaired People
with the help of ultrasound sensor. The smart cane is an inexpensive alternative way of identifying assistive devices to develop and build a smart cane for the visually impaired to detect obstacles. The designed prototype can be made more
equipped by other sensors to make it a perfect device for a visually impaired person. Future work will concentrate on improving the performance of the prototype model.
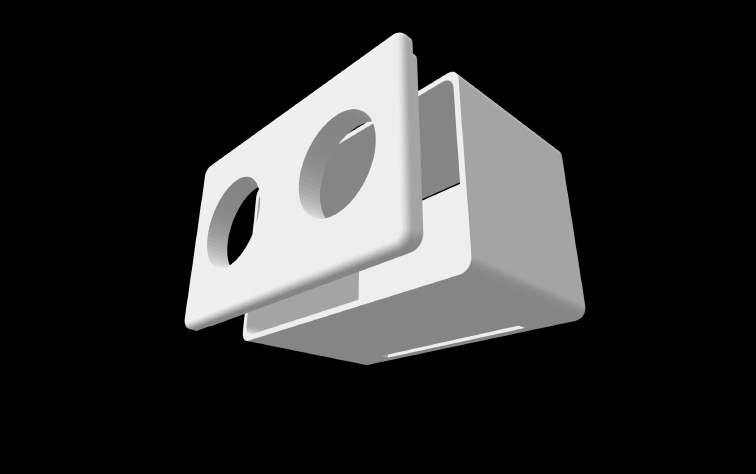
Fig. 3. 3-D design of the casing made on Fusion 360
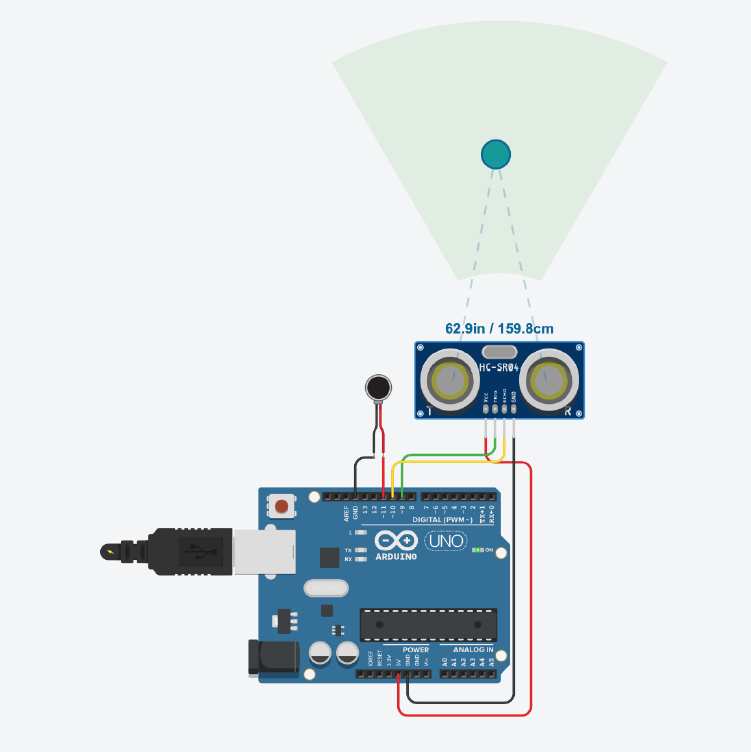
Fig. 4. Simulation of the device performed on Tinkercad
The system was developed in close association with potential users. Feedback was taken during the problem formulation, concept design and prototype evaluation stages which were critical for achieving our objectives. Initial experiments with the target group demonstrated their utility in real life scenarios Users were able to detect raised obstacles like side of a truck, horizontal bar and the edge of a table much before coming in contact with them.
V. LIMITATIONS
Apart from the benefits which the proposed system provides, there are some obvious limitations with the device which cannot be ignored. First, the maximum range of the ultrasonic sensor is only three metres, so, sensors with large range and accuracy can be used. Second, the field of view of the HCSR04 ultrasonic sensor is not very wide when compared to some advanced TS3 sensors.
REFERENCES
- Global data on blindness. Facts sheet, Key Facts of the World Health Organization; June 2012.
- Allan Dodds, “Mobility Training for Visually Handicapped People: A Person-Centred Approach.” pp 33-35, Croom Helm limited 1988.
- Allan Dodds, “Mobility Training for Visually Handicapped People: A Person-Centred Approach.” pp 33-35, Croom Helm limited 1988.
- Benjamin, J. M., “The New C-5 Laser Cane for the Blind.” Carnahan Conference on Electronic Prosthetics, Univ. Kentucky Eng. Experiment Station, pp. 104-106, 1973.
- Dodds, A. G., and J.D. Armstrong, and C.A. Shingledecker. “The Nottingham Obstacle Detector: Development and Evaluation.” Journal of Visual Impairment and Blindness, v75 n5 p203- 09, May 1981.
- Mary T. (Terrie) Terlau, 2005, ‘K’ Sonar and Student Miniguide: Background, Features, Demonstrations and pplications”, Center on Disabilities Technology and Persons with Disabilities Conference, CSU Northridge.
Video
